|
Numar proiect
|
2025/028
|
|
Nume proiect
|
“NextTerraBot” -
Platformă de vehicul terestru fără pilot
|
|
Promotor proiect
|
Rolix Impex Series Srl
|
|
Partener proiect
|
Industrial S srl
|
|
Aria de focusare proiect
|
Mediu industrial
|
|
Obiectiv
strategic
|
Reducerea dependenței de componente asiatice prin
dezvoltarea unui cobot complet proiectat și realizat în România
|
|
Date
tehnice robot
|
Date tehnice platforma independenta de realizat in cadrul proiectului:
- 4 motoare brushless de 500w cu senzori de rotatie si
temperatura,
- Drivere motoare,
- Baterii litiu-ion de 1.5kw
- Dotat cu senzori gps si radar de tip lidar
- Cadrul de sus din aluminiu (pentru montare diversi
senzori sau cutie de transport)
- Poate fi folosit si la livrari sau la cartografiere teren
plan
- Dimensiune: lungime 800mm, latime 440mm, inaltime 320mm
- Sarcina max 300 kg
- Urca pe borduri de 80mm
Proiectul urmărește creșterea productivității,
reducerea costurilor operaționale și crearea unui mediu de lucru
mai eficient și sustenabil. Prin implementarea acestei investiții,
ne aliniem obiectivelor Industriei 4.0 și contribuim la competitivitatea
pe termen lung a sectorului industrial.
|
|
1.
Rezumat Executiv
|
NextTerraBot este un proiect de
cercetare și dezvoltare care vizează realizarea unei platforme
autonome terestre fără pilot, destinată aplicațiilor
civile și industriale precum livrări autonome,  cartografiere, inspecții
și logistică locală. Platforma este
proiectată pentru a opera în teren plan și semi-accidentat, cu
capacitatea de a urca borduri de până la 80 mm și de a transporta o
sarcină utilă de până la 300 kg. cartografiere, inspecții
și logistică locală. Platforma este
proiectată pentru a opera în teren plan și semi-accidentat, cu
capacitatea de a urca borduri de până la 80 mm și de a transporta o
sarcină utilă de până la 300 kg.
Proiectul
răspunde nevoilor actuale ale pieței românești de automatizare,
mobilitate sustenabilă și reducere a dependenței de
tehnologiile asiatice, propunând o soluție tehnologică
dezvoltată integral în România. Se pune accent pe realizarea
mecanismelor de acționare mecanică internă, utilizând
componente europene și expertiză locală în proiectare și
producție.
Obiective principale
ale proiectului:
- Proiectarea
și execuția unui șasiu mecanic modular cu tracțiune
4x4, dotat cu motoare brushless de 500W;
- Integrarea
unui sistem complet de navigație autonomă, folosind
senzori GPS, radar LIDAR și sisteme de control în timp real;
- Utilizarea
de baterii Li-Ion de 1.5 kWh, pentru autonomie energetică
extinsă și funcționare silențioasă (<65 dB);
- Dezvoltarea
unei platforme multifuncționale, adaptabilă atât pentru
transport, cât și pentru aplicații de cercetare, monitorizare
sau livrări autonome.
Buget și
durată:
- Durata
proiectului:
24 luni
- Buget
estimat:
maximum 200.000 euro
- Proiectul
va fi implementat integral în România, cu parteneri locali pentru execuție,
integrare și validare.
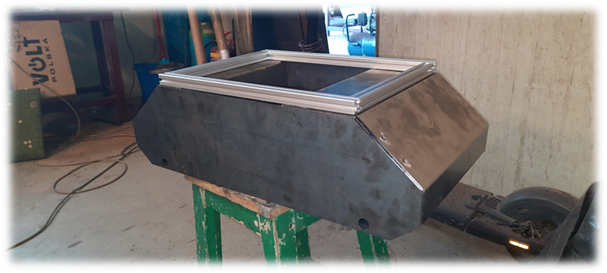
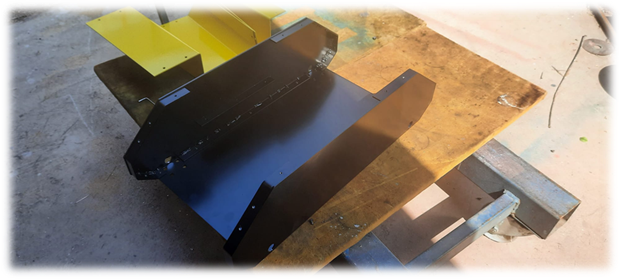
Rezultatul final:
Un
prototip complet funcțional de vehicul terestru autonom, cu
sistem de acționare robust și senzori integrați, pregătit
pentru testare în medii reale și transfer tehnologic către
aplicații comerciale sau logistice.
|
|
2.
Descrierea Tehnică a Proiectului
|
Proiectul
NextTerraBot dezvoltă o platformă autonomă
terestră fără pilot (UGV – Unmanned Ground Vehicle),
destinată aplicațiilor multifuncționale, cu accent pe mobilitate
electrică, modularitate și execuție mecanică internă.
 Designul va permite adaptarea
rapidă la misiuni precum transport de materiale, cartografiere cu
senzori sau livrări urbane automate. Designul va permite adaptarea
rapidă la misiuni precum transport de materiale, cartografiere cu
senzori sau livrări urbane automate.
Specificații tehnice generale
|
Componentă
|
Specificație
tehnică
|
|
Motoare
|
4 × brushless, 500 W
fiecare, cu senzori de rotație și temperatură
|
|
Drivere
|
Drivere independente pentru fiecare roată
|
|
Baterie
|
Li-Ion, 1.5 kWh, autonomie
estimată 2–3 ore
|
|
Senzori
|
GPS de precizie + radar LIDAR pentru evitarea obstacolelor
|
|
Structură mecanică
|
Cadru inferior robust +
cadru superior din aluminiu modular
|
|
Dimensiuni platformă
|
800 mm lungime × 440 mm lățime × 320 mm înălțime
|
|
Sarcină maximă
|
300 kg
|
|
Garda la sol
|
optimizată pentru urcarea bordurilor de până la 80
mm
|
|
Nivel zgomot
|
< 65 dB în sarcină
|
Capacități
funcționale ale platformei
- Urcare
borduri până la 80 mm – transmisia pe 4 roți
independente și motorizare de putere medie permite traversarea
obstacolelor urbane de dimensiuni reduse.
- Transport
de sarcină utilă până la 300 kg – pentru
aplicații în logistică, livrări industriale, transport
materiale sau echipamente.
- Cartografiere
și inspecție – platforma este pregătită
pentru integrarea de senzori (LIDAR, camere, GPS RTK), utile în
monitorizarea mediului, lucrări de infrastructură sau
agricultură de precizie.
- Funcționare
autonomă
– cu sistem de navigație autonomă bazat pe hartă și
rutare automată, inclusiv în spații delimitate (depozite, zone
industriale).
- Interfață
de control
– remote (Wi-Fi sau 4G), cu tabletă sau stație de lucru,
pentru monitorizare și intervenție.
Accent pe sistemul de
acționare mecanică internă
Un
element definitoriu al proiectului este realizarea internă a
întregului mecanism de acționare mecanică:
- Proiectare
CAD și execuție CNC a șasiului, suspensiilor și
sistemelor de fixare a motoarelor;
- Integrarea
motoarelor și driverelor direct în roți, cu transmisie
simplificată (fără axe centrale);
- Testarea
funcțională a fiecărei roți ca unitate mecanică
autonomă,
pentru a permite diagnosticare modulară și întreținere
eficientă;
- Optimizarea
structurii portante pentru greutate redusă și rezistență
crescută, utilizând elemente din aluminiu și oțel
tratat.
Această
abordare permite obținerea unei platforme robuste, fiabile și
adaptabile, proiectată special pentru a răspunde cerințelor
de automatizare industrială și logistică în contextul românesc.
|
|
3. Scopul și necesitatea
proiectului
|
Proiectul
NextTerraBot își propune dezvoltarea unei platforme autonome
terestre fără pilot, capabilă să îndeplinească
sarcini logistice, cartografice și operaționale în medii controlate,
urbane sau industriale. Platforma este proiectată să fie compactă,
modulară, electrică și robustă, cu accent pe realizarea
mecanismelor de acționare  mecanică și
electronică internă, în România. mecanică și
electronică internă, în România.
Scopul
principal este livrarea unui prototip funcțional și testat,
care să demonstreze fezabilitatea tehnologică și utilitatea
practică a vehiculelor autonome de sol în contexte reale din piața
românească.
Probleme identificate
pe piață
1. Lipsa de soluții
autonome dezvoltate local
- În România
nu există în prezent platforme terestre autonome dezvoltate și
fabricate local, în afară de inițiative experimentale.
- Majoritatea
soluțiilor disponibile sunt importate, ceea ce duce la
costuri ridicate, lipsă de suport tehnic local și
dificultăți de personalizare.
2. Cerere tot mai mare
pentru livrări autonome, cartografiere, logistică
- Sectorul
logistic și cel industrial are o nevoie acută de
automatizare, mai ales în livrări pe distanțe scurte,
transport intern sau cartografiere rapidă.
- Urbanizarea
și digitalizarea accelerată generează cerere pentru vehicule
autonome eficiente și fiabile, adaptate la medii controlate
(depozite, campusuri industriale, orașe smart).
- Proiectul
răspunde acestei cereri printr-o soluție scalabilă și
multifuncțională.
3. Dependență
crescută de importuri din China și piețe externe
- Peste 80%
din componentele de robotică mobilă disponibile pe piață
provin din China.
- Pandemia,
instabilitatea geopolitică și problemele de transport au
demonstrat vulnerabilitatea lanțurilor de aprovizionare.
- Dezvoltarea
unui vehicul autonom realizat integral în România
contribuie direct la autonomia tehnologică și la resiliența
industriei locale.
Proiectul
răspunde unei nevoi reale și stringente de pe piața
românească: automatizarea sigură și eficientă a sarcinilor
repetitive și logistice, cu tehnologie locală, sustenabilă
și adaptată. NextTerraBot oferă o soluție concretă
pentru IMM-uri, autorități, servicii publice și industrie, cu
potențial ridicat de replicare și adaptare.
|
|
4. Analiza pieței
|
Potențialul pieței din România pentru vehicule
autonome de sol
Piața
vehiculelor autonome de sol (UGV – Unmanned Ground Vehicles) este
încă emergentă în România, dar cu un potențial ridicat de
creștere, determinat de:
- digitalizarea
accelerată
în industrie, logistică și administrația publică;
- creșterea
nevoii de automatizare a sarcinilor repetitive și periculoase;
 presiunea
pe IMM-uri de a deveni mai eficiente și sustenabile; presiunea
pe IMM-uri de a deveni mai eficiente și sustenabile;- apariția
primelor inițiative de orașe inteligente (smart city),
care vor necesita infrastructură autonomă de transport și
inspecție.
Lipsa
unor soluții locale robuste și accesibile lasă un spațiu
deschis pentru tehnologii dezvoltate în România, cu mentenanță
locală, adaptare la legislație și suport pe termen lung.
Domenii țintă
pentru utilizarea NextTerraBot
1. Livrări
autonome locale
- Transport
de materiale, colete sau produse alimentare în campusuri industriale,
zone logistice sau parcuri industriale;
- Aplicații
urbane pentru curierat pe „ultimul kilometru”;
- Livrări
medicale (consumabile, probe) între secții spitalicești.
2. Agricultură de
precizie
- Cartografiere
terenuri, măsurători, inspecții automate;
- Livrare
echipamente și piese de schimb pe teren agricol;
- Platformă
de testare pentru integrarea de senzori specifici (umiditate, pH,
vizual).
3. Inspecții
industriale și cartografiere
- Inspecția
autonomă a infrastructurii industriale extinse (ferme fotovoltaice,
zone industriale, spații logistice);
- Realizarea
de hărți și modele 3D în timp real pentru lucrări de
construcții, întreținere drumuri sau gestiune spații
verzi.
4. Logistică
urbană și transport intern
- Automatizarea
transportului intern în depozite, hale, centre de distribuție;
- Înlocuirea
transportului manual cu o soluție silențioasă și
sustenabilă;
- Posibilă
integrare în infrastructura urbană inteligentă.
Segmentul IMM-urilor și
autorităților locale
- IMM-urile
din producție, logistică, retail și construcții au
nevoie de soluții autonome accesibile, ușor de întreținut,
fără costurile ridicate ale echipamentelor de import.
- Autoritățile
locale pot folosi platforma pentru:
- inspecții
și monitorizare în parcuri, zone pietonale sau perimetre tehnice;
- aplicații
în smart city (transport documente, echipamente, monitorizare);
- intervenții
rapide în zone inaccesibile vehiculelor clasice.
NextTerraBot
are potențialul de a ocupa o nișă neexploatată pe piața
românească, oferind o platformă multifuncțională,
fiabilă și adaptată, cu aplicații directe într-un spectru
larg de activități industriale, agricole și municipale
|
|
5.
Obiective tehnologice
|
Proiectul
NextTerraBot are ca obiectiv central realizarea unei platforme
terestre autonome, robuste și complet funcționale, cu accent pe execuția
mecanismului de acționare intern, integrarea componentelor
electronice de control și optimizarea pentru condiții reale de
exploatare. Obiectivele tehnologice sunt clar definite și vizează
obținerea unui nivel ridicat de performanță, modularitate și
adaptabilitate.
 1. Proiectarea și execuția
mecanismului de rulare 4x4 1. Proiectarea și execuția
mecanismului de rulare 4x4
- Dezvoltarea
unui șasiu rigid, ușor și modular, optimizat
pentru încărcături de până la 300 kg și pentru
mobilitate pe teren plan și semi-accidentat;
- Implementarea
unei soluții de tracțiune integrală (4x4) cu
transmisie directă pe fiecare roată, fără diferențiale
clasice;
- Asigurarea
unei gărzi la sol optimizate și a unui design capabil
să urce borduri de până la 80 mm;
- Testare
FEM (analiză cu element finit) pentru validarea rezistenței
structurale a platformei în condiții de sarcină maximă.
2. Integrarea
completă a motoarelor brushless, driverelor și bateriilor
- Montarea a
4 motoare brushless de 500W (unul pe fiecare roată), dotate
cu senzori de rotație și temperatură pentru
control de precizie și protecție termică;
- Integrarea
driverelor de control în proximitatea fiecărui motor, pentru latență
redusă și arhitectură modulară;
- Instalarea
unui sistem de alimentare cu baterii Li-Ion de 1.5 kWh, cu
management integrat al energiei (BMS) și autonomie de funcționare
estimată între 2–3 ore;
- Testarea compatibilității
între componentele electrice, software-ul de control și structura
fizică.
3. Dezvoltarea
platformei pentru operare în teren plan și semi-accidentat
- Optimizarea
suspensiei și structurii roților pentru traversarea de
denivelări moderate și obstacole urbane (borduri, rigole);
- Configurarea
senzorilor LIDAR și GPS pentru navigație precisă,
rutare dinamică și evitare de obstacole;
- Posibilitatea
de montare a unui modul de control autonom (procesor embedded)
compatibil cu ROS (Robot Operating System) pentru aplicații
complexe (livrare, cartografiere, inspecție);
- Asigurarea
unei interfețe standardizate de montaj pe platformă
pentru diferite accesorii: containere transport, senzori, camere,
dispozitive specifice clientului.
Livrarea
unei platforme autonome terestre complet funcționale,
capabilă să fie utilizată imediat în scenarii reale de test,
adaptabilă pentru extindere și producție locală
ulterioară.
|
|
6. Inovația propusă
|
Proiectul
NextTerraBot propune o soluție tehnologică inovatoare,
dezvoltată integral în România, care adresează provocările
actuale ale automatizării de teren într-un mod modular, eficient și
scalabil. Inovația rezultă atât din integrarea inteligentă
a tehnologiilor existente, cât și din optimizarea funcțională
și arhitecturală a platformei pentru nevoile pieței
locale.
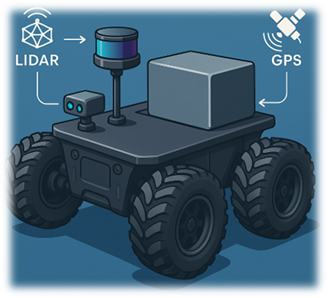 1. Integrarea senzorilor LIDAR + GPS în
platformă compactă 1. Integrarea senzorilor LIDAR + GPS în
platformă compactă
- Sistemul
propus va integra senzori LIDAR și GPS de înaltă precizie,
esențiali pentru navigația autonomă, în evitarea
obstacolelor și în rutarea inteligentă.
- Spre
deosebire de alte vehicule autonome de dimensiuni mari, NextTerraBot
oferă aceste funcționalități într-o platformă
compactă (800×440 mm), fără a compromite mobilitatea
sau capacitatea de transport.
- LIDAR-ul
va permite detecția 3D a mediului în timp real, iar GPS-ul
va oferi localizare geospațială și posibilitate de
cartografiere și urmărire a traseului parcurs.
2. Sistem modular de
montaj senzori / cutii de transport
- Cadrul
superior al platformei este proiectat din profiluri de aluminiu
standardizate, permițând fixarea rapidă a diverselor
module funcționale (ex. senzori suplimentari, cutii pentru
livrări, echipamente speciale).
- Se
asigură o interfață universală de montaj (șine
sau prinderi rapide), care transformă platforma într-un vehicul
multifuncțional, adaptabil la:
- transport
logistic;
- inspecții
industriale;
- cercetare
în aer liber;
- livrări
medicale sau comerciale.
- Această
modularitate aduce costuri reduse de adaptare și extensibilitate
pe verticală a funcțiilor platformei.
3. Autonomie energetică
ridicată cu baterii interne optimizate
- Platforma
este alimentată de baterii Li-Ion de 1.5 kWh, cu un sistem
inteligent de management al energiei (BMS), care optimizează
consumul și protejează componentele electrice.
- Distribuția
sarcinii între cele 4 motoare este gestionată prin drivere
eficiente energetic, iar funcționarea silențioasă (<65
dB) asigură utilizarea în spații urbane sau interioare.
- Se
estimează o autonomie funcțională de până la 3
ore în regim mixt, cu posibilitate de extindere prin baterii
suplimentare modulare sau panouri solare auxiliare (pentru aplicații
outdoor extinse).
Valoarea
adăugată a inovației NextTerraBot
Prin
combinarea:
- mobilității
inteligente,
- modularității
constructive,
- integrării
avansate a senzorilor,
- și
alimentării eficiente energetic,
NextTerraBot oferă o
alternativă locală viabilă la soluțiile internaționale
scumpe și rigide, susținând autonomia tehnologică,
scalabilitatea și personalizarea aplicațiilor de automatizare de
sol.
|
|
7.
Planul de implementare
|
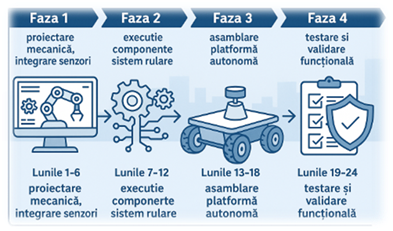
Proiectul
NextTerraBot este structurat pe o durată de 24 de luni, cu
etape tehnice clare, livrabile intermediare și obiective măsurabile
pentru fiecare fază de dezvoltare. Planul de implementare este gândit
pentru a asigura un parcurs logic, incremental și eficient, de la
concept la prototip testat și validat.
Faza 1 – Proiectare și
simulare (Lunile 1–6)
 Obiectiv: Definirea
arhitecturii mecanice, electrice și de control Obiectiv: Definirea
arhitecturii mecanice, electrice și de control
- Proiectare
CAD a șasiului, sistemului de rulare și structurii modulare;
- Alegerea și
dimensionarea motoarelor, driverelor, bateriilor și senzorilor;
- Simulări
mecanice (FEM) pentru testarea rezistenței și distribuției
sarcinii;
- Elaborarea
schemei electrice și arhitecturii software;
- Achiziție
de componente pentru prototip.
Livrabile: Documentație
tehnică completă, plan de execuție și plan de testare.
Faza 2 – Execuție
mecanică și electrică (Lunile 7–12)
Obiectiv: Fabricarea și
asamblarea componentelor de bază
- Producerea
locală a componentelor mecanice (șasiu, cadru, roți,
sisteme de fixare);
- Integrarea
motoarelor brushless și driverelor în platformă;
- Montarea
bateriilor și sistemului de alimentare;
- Configurarea
cablajelor și testarea inițială a funcționalității
de bază;
- Verificare
statică și testare fără sarcină.
Livrabile: Platforma mecanică
completă + testare inițială hardware.
Faza 3 – Integrare
senzori și software de control (Lunile 13–18)
Obiectiv: Obținerea funcționalității
autonome de navigație
- Instalarea
senzorilor LIDAR și GPS;
- Integrarea
interfeței de comunicație și control (tabletă, stație);
- Dezvoltarea
și testarea software-ului pentru navigație autonomă;
- Validarea
rutării, evitării obstacolelor și controlului direcțional;
- Simulări
și testări în medii controlate.
Livrabile: Sistem integrat
complet, funcțional în regim semiautonom.
Faza 4 – Testare finală și validare (Lunile 19–24)
Obiectiv: Validarea funcțională
a prototipului în scenarii reale
- Teste de
performanță pe teren plan și semi-accidentat;
- Teste de
sarcină maximă (300 kg), urcare borduri, rezistență
la vibrații;
- Validare a
autonomiei energetice și a navigației în regim real;
- Ajustări
de finețe, optimizări software și mecanice;
- Raport de
validare + documentație pentru replicare.
Livrabile: Prototip validat,
raport tehnic și recomandări pentru industrializare.
Proiectul este monitorizat continuu prin
milestone-uri lunare și revizii bimestriale, cu documentație
tehnică aferentă fiecărei faze.
|
|
8.
Echipa proiectului
|
Implementarea
cu succes a proiectului NextTerraBot este susținută de o
echipă multidisciplinară, formată din specialiști cu
experiență în proiectare mecanică, mecatronică,
electronică, software de control și management de proiect.
Structura echipei permite o abordare integrată, asigurând dezvoltarea
prototipului la un standard tehnologic ridicat.
 1. Coordonator proiect – inginer senior
R&D 1. Coordonator proiect – inginer senior
R&D
- Experiență
în conducerea proiectelor de cercetare aplicată și dezvoltare
de sisteme robotizate;
- Răspunde
de planificarea strategică, managementul resurselor și
raportarea către finanțatori;
- Supervizează
implementarea tehnică și menține legătura cu
partenerii externi.
2. Inginer mecanic –
proiectare și execuție structurală
- Responsabil
de proiectarea CAD 3D a platformei: șasiu, transmisie, cadru
superior;
- Coordonează
execuția pieselor mecanice, verifică rezistența
materialelor și montajul subansamblelor;
- Asigură
compatibilitatea între structura mecanică și componentele
electronice.
3. Inginer
mecatronică – motoare, senzori și integrare electrică
- Gestionează
integrarea motoarelor brushless, driverelor și sistemului de
alimentare;
- Coordonează
instalarea senzorilor (GPS, LIDAR) și sistemul de navigație;
- Dezvoltă
arhitectura de control, comunicare și sistemele de siguranță
activă.
4. Programator/Inginer
software embedded
- Dezvoltă
software-ul de navigație, rutare, monitorizare și interfață
de control;
- Asigură
compatibilitatea cu ROS (Robot Operating System), conectivitate
Wi-Fi/Bluetooth;
- Se
ocupă de testarea funcțională a algoritmilor de control și
evitare obstacole.
5. Tehnicieni specializați
– execuție și testare
- Realizează
montajul fizic al subansamblelor mecanice și electrice;
- Participă
la fazele de testare, calibrare și ajustări tehnice ale
platformei;
- Oferă
suport pentru validarea prototipului și depanare în timpul testelor
funcționale.
6. Colaboratori externi (opțional)
- Specialiști
din universități tehnice (ex. Politehnica București) sau
centre de cercetare pentru testare, validare sau asistență
metodologică;
- Furnizori
sau integratori cu experiență în robotică mobilă.
Echipa este formată în mod
echilibrat pentru a acoperi toate competențele necesare și
poate fi extinsă în funcție de etapele proiectului sau nevoile
specifice de integrare și testare.
|
|
9.
Estimare costuri și buget
|
Implementarea
proiectului NextTerraBot necesită o structură bugetară
echilibrată, aliniată etapelor de cercetare, dezvoltare, integrare și
testare. Bugetul total estimat este de 200.000 €, repartizat eficient
între activitățile tehnice, achiziții, execuție și
managementul proiectului.
Structura bugetului
estimat
|
Categorie
|
Buget
estimat (€)
|
Descriere
|
|
Proiectare mecanică și
electrică
|
30.000
|
CAD, simulări FEM,
schemă electrică, layout general
|
|
Execuție mecanism 4x4 și
șasiu
|
35.000
|
Prelucrări CNC, materiale (aluminiu, oțel),
asamblare
|
|
Motoare brushless + drivere
|
30.000
|
4× motoare 500W, drivere
programabile, cablaje speciale
|
|
Baterii Li-Ion și
sistem BMS
|
15.000
|
Acumulatori 1.5 kWh + sistem de gestiune energetică
|
|
Senzori LIDAR și GPS
industrial
|
20.000
|
Integrare senzori de navigație
de precizie
|
|
Software de control și
comunicație
|
20.000
|
Algoritmi, interfață control, conectivitate
(Wi-Fi/Bluetooth)
|
|
Testare, validare și
prototipare
|
20.000
|
Echipamente test, depanare,
ajustări
|
|
Management de proiect și
PM
|
20.000
|
Coordonare, documentație, raportare, audit
|
|
Rezervă bugetară
(10%)
|
10.000
|
Risc de prețuri
neprevăzute, întârzieri aprovizionare
|
TOTAL ESTIMAT : 200.000 €
Note:
- Bugetul
acoperă dezvoltarea integrală a prototipului funcțional,
cu accent pe execuție locală și independență față
de soluțiile comerciale de import.
- Se
evită achizițiile de soluții „off-the-shelf”, investind
în capacitatea de cercetare și fabricare internă.
- Se
alocă o rezervă de 10% pentru gestionarea riscurilor
tehnice sau financiare apărute pe parcurs.
|
|
10.
Parteneriate și colaborări
|
Pentru
succesul implementării proiectului NextTerraBot, este esențială
o rețea de colaboratori tehnici și instituționali care să
contribuie la execuție, validare și extinderea aplicabilității
tehnologice. Proiectul valorifică resurse și expertiză
locală, iar parteneriatele propuse sunt alese strategic pentru a asigura
eficiență, calitate și sustenabilitate.
 1. Parteneri tehnologici și industriali
(execuție și integrare) 1. Parteneri tehnologici și industriali
(execuție și integrare)
- Firme de
prelucrări mecanice CNC și prototipare rapidă: pentru
execuția cadrului, componentelor de transmisie și elementelor
de fixare;
- Ateliere
locale de electronică: pentru montarea circuitelor
electrice, testare drivere și integrarea senzorilor;
- Integratori
de automatizări:
colaborări punctuale pentru validarea protocoalelor de comunicație
și optimizarea rutării.
Obiectiv: realizarea tuturor componentelor
mecanice și electronice în România, cu furnizori UE doar pentru
componente de precizie (LIDAR, baterii).
2. Colaborări
academice și centre de cercetare
- Universitatea
Politehnica din București – Facultatea de Inginerie
Mecanică și Mecatronică: expertiză în
cinematică, materiale, modelare și validare;
- Universitatea
Tehnică din Cluj-Napoca – colaborare pentru testare embedded
software și senzoristică;
- INCDMC sau
alte institute de cercetare tehnologică: acces la
laboratoare de testare și validare formală.
Obiectiv: validarea funcțională și
științifică a prototipului și crearea unui cadru pentru
diseminarea rezultatelor.
3. Furnizori europeni
specializați (componente critice)
- Producători
europeni de motoare brushless și drivere (ex.
Maxon, Elmo, TQ Robotics);
- Furnizori
LIDAR și GPS industrial (Velodyne, Ouster, Septentrio);
- Parteneri
pentru baterii Li-Ion și sisteme BMS, certificați
CE.
Obiectiv: acces la componente de înaltă
calitate, cu suport tehnic și documentație completă,
compatibile cu standardele europene.
4. Posibile
parteneriate post-proiect
- Operatori
logistici și firme de curierat – pentru testarea reală a
livrărilor autonome;
- Administrații
publice locale / smart city – pentru aplicații urbane
(monitorizare, întreținere, transport);
- Start-up-uri
în robotică
– pentru scalarea producției și adaptarea modulară.
Valoare
adăugată a colaborărilor
- Acces la expertiză
externă complementară;
- Reducerea
costurilor
prin externalizarea inteligentă a execuției;
- Validare și
recunoaștere academică și industrială pentru
soluția propusă;
- Deschidere
spre parteneriate comerciale post-proiect, inclusiv posibilă
industrializare.
|
|
11.
Strategia de comercializare
|
După
finalizarea fazei de cercetare și dezvoltare, proiectul NextTerraBot
va intra în etapa de valorificare comercială a rezultatelor. Strategia
de comercializare vizează poziționarea pe piața
românească ca soluție autonomă, accesibilă și
modulară, destinată IMM-urilor și autorităților
locale interesate de automatizare și eficientizare logistică.
1. Vânzare directă
către IMM-uri și organizații
- Oferirea
platformei NextTerraBot ca echipament standardizat,
personalizabil în funcție de domeniul de aplicare (logistică,
agricultură, inspecție);
- Comercializare
B2B cu accent pe:
- firme de
curierat și livrări locale;
- operatori
logistici sau depozite;
- ateliere
sau fabrici cu transport intern de materiale;
- IMM-uri
din agricultură, construcții sau producție.
Avantaje
competitive:
- Cost redus
față de soluțiile importate;
- Asistență
tehnică locală și mentenanță rapidă;
- Adaptare
la cerințele clientului prin arhitectura modulară.
2. Licențierea
tehnologiei și producției
- Oferirea
dreptului de licențiere a soluției NextTerraBot
către:
- integratori
de automatizări;
- producători
de echipamente inteligente;
- companii
care doresc să fabrice sub licență modele proprii,
bazate pe arhitectura dezvoltată.
Beneficii:
- Scalare
fără investiții suplimentare directe;
- Crearea
unui ecosistem de parteneri industriali în jurul platformei;
- Transfer
de know-how cu încasări din licențiere și suport tehnic.
3. Comercializare
modulară pe funcționalități
- Posibilitatea
de a vinde platforma în configurații parțiale sau ca
bază pentru aplicații personalizate, cum ar fi:
- platformă
cu cadru de senzori LIDAR/GPS pentru cartografiere;
- platformă
cu boxă de transport securizat pentru livrări;
- platformă
cu cameră de inspecție și analiză pentru construcții
sau agricultură.
4. Canale de promovare și
vânzare
- Website
propriu + demonstrații video în aplicații reale;
- Prezență
la târguri de tehnologie, agricultură și industrie (ex. Demo
Metal, Indagra, Smart Mobility);
- Colaborare
cu distribuitori locali de echipamente industriale sau agriculturale;
- Rețea
de parteneri și integratori pentru preluarea cererilor și
adaptarea platformei.
Obiectiv pe 2–3 ani:
- Realizarea
unei serii mici (5–10 unități) pentru testare
industrială;
- Crearea
unei linii pilot de asamblare internă;
- Începerea
livrării comerciale în România și, ulterior, în alte țări
din Europa Centrală și de Est.
|
|
12.
Strategia de proprietate intelectua
|
Proiectul
NextTerraBot dezvoltă o platformă terestră
autonomă originală, cu arhitectură mecanică și
electronică proprie, ceea ce impune o abordare clară și
riguroasă privind protecția proprietății intelectuale.
Obiectivul este asigurarea exclusivității asupra rezultatelor
cheie, prevenirea copierii și facilitarea licențierii în condiții
sigure.
 1. Drepturi de autor pentru documentația
tehnică și software 1. Drepturi de autor pentru documentația
tehnică și software
- Se vor
înregistra drepturi de autor asupra:
- modelelor
CAD 3D ale șasiului și structurii modulare;
- documentației
de execuție mecanică și electrică;
- schemei
electrice și arhitecturii sistemului de control;
- codului sursă
pentru interfața de control, rutare și navigație
autonomă.
Această protecție acoperă
atât componentele vizibile (design, structură), cât și cele funcționale
(logica software, algoritmi de mișcare).
2. Brevetare opțională
– mecanisme și modularitate
- Se va
analiza posibilitatea depunerii unui brevet de invenție
pentru:
- sistemul
modular de montaj senzori și cutii de transport;
- arhitectura
integrată motor–driver–roată;
- cadrul
structural pliabil sau extensibil (dacă se dezvoltă
această funcție).
Brevetarea oferă exclusivitate pentru
componentele sau principiile inovatoare și deschide oportunități
de licențiere ulterioară.
3. Acorduri de confidențialitate (NDA)
- Toți
colaboratorii implicați în proiect, inclusiv:
- furnizorii
de piese custom;
- partenerii
academici;
- integratorii
externi;
vor
semna acorduri de confidențialitate care interzic:
- reproducerea
neautorizată a planurilor tehnice;
- comercializarea
derivatelor;
- divulgarea
informațiilor tehnice către terți.
Această măsură
protejează know-how-ul dezvoltat până la lansarea comercială.
4. Marcarea și
documentarea proprietății
- Toate
materialele rezultate (fizice sau digitale) vor purta marcaj de
copyright și cod intern de trasabilitate;
- Se va
întocmi o arhivă digitală a versiunilor tehnice, cu
evidența clară a modificărilor și autorilor implicați;
- Se va
înregistra denumirea „NextTerraBot” ca marcă verbală și
grafică, în vederea lansării comerciale.
Strategia
IP este construită pentru a:
- proteja
inovația locală;
- permite
transferul tehnologic în siguranță;
- crea
valoare economică prin licențiere sau vânzare exclusivă;
- susține
competitivitatea proiectului pe termen lung.
|
|
13.
Riscuri și măsuri de atenuare
|
Dezvoltarea
unei platforme autonome implică riscuri tehnice, logistice și financiare,
specifice unui proiect de cercetare aplicată. NextTerraBot
propune un sistem de management al riscurilor structurat pe identificare
timpurie, prevenție activă și reacție rapidă în
fazele critice ale implementării.
 1. Riscuri tehnice 1. Riscuri tehnice
Riscuri:
- Defecțiuni
la motoare, drivere sau baterii;
- Incompatibilități
între module mecanice, electrice și software;
- Performanță
insuficientă a sistemului de navigație autonomă.
Măsuri de atenuare:
- Testare
incrementală
a componentelor individuale înainte de integrarea în sistemul complet;
- Alegerea
de componente compatibile și standardizate (ex. motoare
brushless cu drivere certificate);
- Simulări
3D și validare funcțională pe bancuri de test.
2. Riscuri de aprovizionare
Riscuri:
- Întârzieri
în livrarea componentelor importate (LIDAR, baterii);
- Lipsa unor
piese specializate pe piața locală;
- Creșteri
neprevăzute ale costurilor de transport sau achiziție.
Măsuri de atenuare:
- Selectarea
a cel puțin doi furnizori alternativi pentru
fiecare componentă critică;
- Achiziție
în avans pentru componentele cu lead time mare;
- Planificarea
bugetară flexibilă, cu rezervă de 10%.
3. Riscuri financiare
Riscuri:
- Depășirea
bugetului alocat din cauza schimbărilor de prețuri;
- Necesitatea
de achiziții suplimentare neprevăzute în fazele finale.
Măsuri de atenuare:
- Rezervă
bugetară internă de 10.000 €;
- Monitorizare
continuă a execuției bugetare;
- Posibilitate
de ajustare a specificațiilor fără a compromite funcționalitatea.
4. Riscuri de integrare
și funcționare
Riscuri:
- Eșec
în coordonarea subsistemelor mecanice, electrice și software;
- Instabilitate
în comportamentul autonom în medii reale.
Măsuri de atenuare:
- Etape
clare de integrare: mecanică → electrică →
software;
- Testare
funcțională progresivă în condiții controlate și
apoi reale;
- Posibilitatea
activării unui mod semiautonom (manual override) în timpul
testelor.
5. Riscuri de
utilizare/acceptare pe piață
Riscuri:
- Piața
țintă nu este suficient de pregătită pentru soluții
autonome;
- Costul perceput
este considerat ridicat de potențialii clienți.
Măsuri de atenuare:
- Strategie
de promovare educațională: demonstrații, clipuri
video, aplicații reale;
- Model de comercializare
modulară și scalabilă (ex: vânzare fără
senzori avansați pentru preț mai mic);
- Posibilitate
de licențiere tehnologică pentru adaptări
comerciale rapide.
NextTerraBot
este pregătit pentru implementare printr-o abordare solidă de management
al riscurilor, care minimizează incertitudinea tehnică și
financiară, oferind un cadru de dezvoltare robust și flexibil.
|
|
14.
Impact economic și industrial
|
Proiectul
NextTerraBot contribuie direct la consolidarea autonomiei tehnologice
în România și oferă un răspuns inovator la nevoia tot mai mare
de automatizare sustenabilă în sectoare precum logistică,
agricultură, inspecție și servicii urbane. Impactul său
economic și industrial este semnificativ pe mai multe planuri.
1. Stimularea
capacității de producție locală
- Proiectul
demonstrează fezabilitatea realizării unei platforme
autonome 100% dezvoltate și fabricate în România,
fără a depinde de soluții „off-the-shelf” din Asia.
 Creează
premisele pentru formarea unui lanț valoric intern,
implicând ateliere de prelucrare, furnizori locali de componente,
dezvoltatori software și integratori. Creează
premisele pentru formarea unui lanț valoric intern,
implicând ateliere de prelucrare, furnizori locali de componente,
dezvoltatori software și integratori.- Rezultatul
este un prototip replicabil industrial, cu potențial de
scalare în producție și adaptare pentru aplicații
comerciale.
2. Reducerea costurilor
de automatizare pentru IMM-uri
- IMM-urile
românești, în special din logistică, industrie și
agricultură, au acces dificil la soluții autonome din cauza
costurilor ridicate și lipsei de suport local.
- NextTerraBot
oferă o alternativă viabilă și accesibilă,
reducând costurile totale de automatizare cu până la 30–40%,
comparativ cu importurile din China sau Vestul Europei.
- Platforma
permite IMM-urilor să automatizeze procese repetitive
fără infrastructură complexă, crescând eficiența
operațională.
3. Dezvoltarea
ecosistemului de robotică mobilă
- Proiectul
creează un nucleu tehnologic capabil să atragă:
- alți
dezvoltatori de echipamente autonome;
- universități
interesate de colaborare aplicată;
- start-up-uri
orientate spre mobilitate inteligentă.
- Se
deschide astfel calea pentru apariția unei nișe de
robotică terestră colaborativă în România, cu aplicații
comerciale, civile și chiar guvernamentale (smart city,
infrastructură, agricultură de precizie).
4. Creșterea
independenței față de piețele externe (China)
- Într-un
context global marcat de tensiuni comerciale și instabilitate în
aprovizionare, realizarea locală a NextTerraBot reduce dependența
de importuri critice, în special din Asia.
- Proiectul
valorifică componente din UE și know-how local, contribuind la
resiliența tehnologică și economică a industriei
românești.
5. Contribuție la
obiectivele europene de sustenabilitate și digitalizare
- Vehicul
electric, silențios și fără emisii directe;
- Modular, ușor
de adaptat, cu durată lungă de viață;
- Pregătit
pentru integrarea în ecosisteme smart city, ferme inteligente sau
infrastructură digitalizată.
NextTerraBot nu este doar un
proiect tehnologic, ci un catalizator pentru inovare industrială,
dezvoltare economică durabilă și autonomie strategică.
Impactul său depășește faza de prototip, având potențialul
de a genera o schimbare structurală în piața românească de
automatizări mobile.
|
|
15.
Monitorizare și evaluare
|
Pentru
a asigura o implementare coerentă, eficientă și în termenii
stabiliți, proiectul NextTerraBot va aplica un sistem clar de
monitorizare și evaluare, care să permită controlul constant
al progresului tehnic, bugetar și organizațional.
Acest
sistem are la bază criterii măsurabile, milestone-uri
intermediare, precum și mecanisme de verificare și ajustare
continuă a execuției.
 1. Livrabile clare și verificabile 1. Livrabile clare și verificabile
Fiecare
fază a proiectului este asociată cu rezultate concrete și
cuantificabile:
- Faza 1:
Documentație CAD completă, simulări FEM, schema
electrică finalizată;
- Faza 2: Șasiu
și cadru asamblate, sistem de tracțiune funcțional;
- Faza 3:
Integrare completă a motoarelor, bateriilor și senzorilor,
software operațional;
- Faza 4: Prototip
funcțional testat în mediu real, raport de validare tehnică.
Toate
livrabilele vor fi însoțite de fișe tehnice, rapoarte și
înregistrări video/foto ale testelor și etapelor-cheie.
2. Monitorizare
periodică prin milestone-uri
- Proiectul
este împărțit în 4 faze semestriale, fiecare cu
obiective și rezultate clare;
- Se vor
realiza revizuiri lunare interne (tehnice și financiare) și
rapoarte bimestriale de progres;
- Evaluarea
va fi făcută de coordonatorul de proiect împreună cu
liderii tehnici și financiari.
Acest sistem permite identificarea
timpurie a eventualelor blocaje și ajustarea resurselor pentru menținerea
ritmului planificat.
3. Mecanism de audit
intern și control al execuției
- Vor fi
desemnați responsabili pentru:
- calitatea
execuției tehnice (verificarea conformității
pieselor, montajului, funcționării);
- conformitatea
bugetară și contractuală
(urmărirea cheltuielilor și a termenelor);
- gestionarea
riscurilor și documentarea neconformităților.
- Se va
realiza o evaluare finală independentă (internă
sau cu sprijin academic/tehnic extern), pentru validarea completă a
prototipului.
4. Instrumente de
evaluare a impactului
- La finalul
proiectului, vor fi analizate:
- performanțele
tehnice reale vs. obiectivele inițiale;
- adaptabilitatea
platformei în scenarii reale de utilizare;
- interesul
potențialilor clienți și parteneri industriali (prin
sondaje sau testări pilot);
- fezabilitatea
replicării și comercializării în serie
mică.
Sistemul
de monitorizare și evaluare din proiectul NextTerraBot
garantează trasabilitatea completă a procesului, asigurând calitate,
transparență și capacitate de adaptare pe tot parcursul
celor 24 de luni de implementare.
|
|
|
|
|
|

|
|
|
|
|
|

|
|
|
|
|
|

|
