|
Numar proiect
|
2022/022
|
|
Nume proiect
|
“ Cobotix-6” – Sistem
Robotizat Industrial
|
|
Promotor proiect
|
Rolix Impex Series Srl
|
|
Partener proiect
|
Industrial S srl
|
|
Aria de focusare proiect
|
Mediu industrial
|
|
Obiectiv
strategic
|
Reducerea dependenței de componente asiatice prin
dezvoltarea unui cobot complet proiectat și realizat în România
|
|
Date
tehnice robot
|
Date tehnice brate robotice de tip cobot de realizat in cadrul
proiectului:
1. Grade
libertate: 6
2. Lungime totala:
1400mm
3. Greutate maxima
de ridicat: 10kg
4. Precizie in
manipulare si repetabilitate: +/- 0.1mm
5. IP: IP54
6. Zgomot:
<65dB
7. Comunicatii:
ModBus si wifi
8. Mediu de
operare: 0-45grade C
9. Accesorii:
oprire de urgenta, controller, tableta de controll,
Proiectul urmărește creșterea productivității,
reducerea costurilor operaționale și crearea unui mediu de lucru
mai eficient și sustenabil. Prin implementarea acestei investiții,
ne aliniem obiectivelor Industriei 4.0 și contribuim la competitivitatea
pe termen lung a sectorului industrial.
|
|
|
|
|
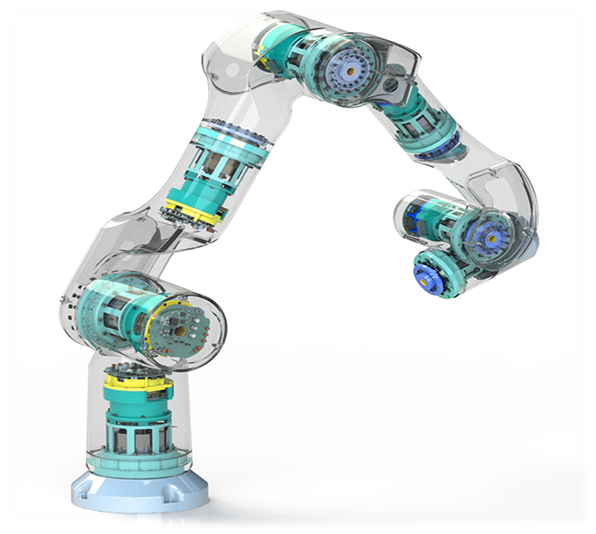
Elementele unui COBOT
|
Un
cobot (robot colaborativ) este un sistem mecatronic complex, compus dintr-o
varietate de elemente mecanice și electrice care lucrează
împreună pentru a realiza sarcinile dorite în colaborare cu oamenii.
Iată principalele categorii de elemente:
Elemente
Mecanice:
- Structura
cinematică (Brațul robotului):
- Legături
(Links): Corpuri rigide interconectate care formează
scheletul robotului. Numărul și configurația lor
determină gradul de libertate (DOF) al robotului.
- Articulații
(Joints): Conexiuni care permit mișcarea relativă între
legături. Tipurile comune includ articulații rotative
(revolute) și prismatice (glisante). Coboții au de obicei
între 4 și 7 grade de libertate pentru a oferi flexibilitate în
mișcare.
- Sistem de
acționare mecanică:
- Reductoare
de viteză (Gearboxes): Mecanisme utilizate pentru a reduce
viteza de rotație a motoarelor și a crește cuplul
disponibil la articulații. Tipurile comune includ reductoare
armonice, planetare, cicloidale și melcate. Precizia și jocul
redus sunt esențiale pentru coboti.
- Transmisii
de putere: Elemente care transferă mișcarea de la motor la
reductor sau direct la articulație (ex: curele, lanțuri,
șuruburi cu bile).
- Efectorul
final (End-Effector): Unealta atașată la ultimul
segment al brațului robotului pentru a interacționa cu mediul.
Exemple includ:
- Clești
(Grippers): Mecanisme pentru prinderea și manipularea
obiectelor. Pot fi mecanici, pneumatici, electrici sau cu vacuum.
- Scule
speciale: În funcție de aplicație (ex: instrumente de
sudură, pistoale de vopsit, șurubelnițe).
- Sistem de
echilibrare (Counterbalance Systems): În coboții mai mari, pot
exista sisteme mecanice (ex: arcuri, contragreutăți) pentru a
reduce efortul necesar motoarelor pentru a menține anumite
poziții.
- Elemente
de fixare și asamblare: Șuruburi, bolțuri, elemente
de prindere pentru a asambla componentele robotului.
- Carenaje
și protecții: Elemente structurale care acoperă
și protejează componentele interne ale robotului.
Elemente
Electrice:
- Servomotoare
(Servomotors):
Motoare electrice cu feedback în buclă închisă (de obicei prin
encodere) care permit un control precis al poziției, vitezei
și cuplului articulațiilor.
- Drivere
pentru motoare (Motor Drivers): Circuite electronice care
controlează alimentarea cu energie a servomotoarelor, primind
comenzi de la controlerul robotului. Adesea integrate în
articulații pentru a reduce cablajul.
- Encodere
(Encoders):
Senzori de poziție rotativă atașați la motoare sau
articulații pentru a oferi feedback precis controlerului. Pot fi
absolute sau incrementale.
- Senzori:
Utilizați pentru a percepe mediul și starea robotului:
- Senzori
de forță/cuplu: Măsoară forțele
și momentele aplicate robotului, esențiali pentru
interacțiunea sigură cu oamenii și pentru aplicații
de manipulare sensibilă.
- Senzori
de proximitate: Detectează apropierea de obiecte sau oameni pentru a
asigura siguranța.
- Senzori
de coliziune: Detectează impactul pentru a opri mișcarea
robotului în caz de coliziune.
- Senzori
de curent/tensiune: Monitorizează parametrii electrici ai motoarelor.
- Controlerul
robotului (Robot Controller): Un computer industrial care
primește date de la senzori, execută algoritmi de control
și generează comenzi pentru driverele motoarelor. Este
"creierul" robotului.
- Sistem de
alimentare (Power Supply): Furnizează energia electrică
necesară tuturor componentelor electrice ale robotului.
- Cabluri
și conectori:
Asigură conexiunile electrice între diferitele componente. Cablajul
este adesea intern și rutat cu grijă pentru a permite
mișcarea articulațiilor fără a se deteriora.
- Interfață
om-mașină (HMI - Human-Machine Interface): Panou de
control, tabletă sau software pe un computer extern utilizat pentru
programarea, operarea și monitorizarea cobotului.
- Sistem de
siguranță:
Circuite și componente dedicate pentru a asigura funcționarea
sigură a cobotului în colaborare cu oamenii (ex: limitatoare de
cuplu, monitoare de viteză, zone de siguranță)
|
|
La
ce poate fi utilizat un COBOT?
|

|
|
1.
Rezumat Executiv
|
Proiectul
Cobotix-6H își propune să dezvolte un braț robotic
colaborativ industrial cu 6 grade de libertate (6 DOF), destinat
automatizării inteligente a proceselor industriale esențiale
precum: sudură, vopsire, manipulare, lipire, debavurare, asamblare,
paletizare, ambalare, inspecție de calitate, finisare și testare
produse. Proiectul va fi implementat pe o perioadă de 24 luni,
exclusiv în România, cu un buget estimat de maximum 250.000 euro.
Acesta este conceput pentru a contribui la creșterea autonomiei
tehnologice naționale și la reducerea dependenței de
componente critice provenite din China, prin dezvoltarea unui produs
integral proiectat și realizat local.
Brațul
robotizat va avea o lungime totală de 1400 mm, o capacitate de
manipulare de până la 10 kg, o repetabilitate de ±0,1 mm, grad de
protecție IP54 și comunicații industriale moderne (Modbus
și Wi-Fi). Toate mecanismele de acționare mecanică,
ansamblurile electromecanice, proiectarea hardware (PCB-uri), controlul
automat și software-ul vor fi dezvoltate intern, cu execuția
componentelor realizată local.
Obiectivele
principale
Tehnice:
- Proiectarea,
execuția și integrarea unui sistem de acționare cu 6
grade de libertate bazat pe servomotoare, reductoare armonice și
drivere poziționate în articulații
- Integrarea
de senzori de forță, coliziune și curent/tensiune
- Realizarea
unui prototip funcțional complet testat în condiții
reale
Comerciale:
- Asigurarea
unei alternative locale competitive față de soluțiile
importate
- Adaptarea
cobotului la nevoile IMM-urilor românești din producție
și logistică
- Pregătirea
comercializării sau licențierii tehnologiei după
finalizarea proiectului
Strategice:
- Consolidarea
capacității de cercetare-dezvoltare naționale în
robotică industrială
- Crearea
unei baze tehnologice scalabile pentru o viitoare linie de produse
autohtone
- Susținerea
obiectivelor UE privind sustenabilitatea și digitalizarea
industriei
La
finalul celor 24 de luni, proiectul va livra un prototip funcțional
de cobot cu 6 grade de libertate, proiectat și executat integral în
România, validat din punct de vedere tehnic, mecanic, electronic și
software, pregătit pentru integrare în aplicații industriale
variate.
|
|
2.
Descrierea Tehnică a Proiectului
|
Specificații tehnice generale ale cobotului Cobotix-6H:
|
Specificație
|
Valoare
tehnică
|
|
Grade de libertate (DOF)
|
6 axe articulate
|
|
Lungime totală
|
1400 mm
|
|
Sarcină utilă
maximă
|
10 kg
|
|
Precizie/repetabilitate
|
± 0.1 mm
|
|
Grad de protecție
|
IP54 (praf și stropi de
apă)
|
|
Nivel de zgomot
|
< 65 dB
|
|
Comunicare
|
Modbus RTU / TCP, Wi-Fi
local
|
|
Interval de temperatură
operare
|
0 – 45 °C
|
|
Alimentare
|
24–48 V DC (proiect
adaptabil la rețea)
|
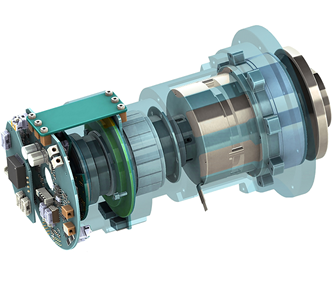
⚙Mecanismul de
acționare
În
centrul proiectului Cobotix-6H se află dezvoltarea și testarea mecanismelor
de acționare articulate pentru un braț robotizat cu 6 grade de
libertate. Brațul va fi alcătuit dintr-o serie de module
independente, fiecare corespunzând unei articulații, astfel:
- Servomotoare
industriale compacte
(cu encoder încorporat) – asigură mișcare precisă în
fiecare grad de libertate.
- Reductoare
armonice de înaltă precizie – permit transmiterea cuplului necesar
în condiții de spațiu limitat, fără joc mecanic.
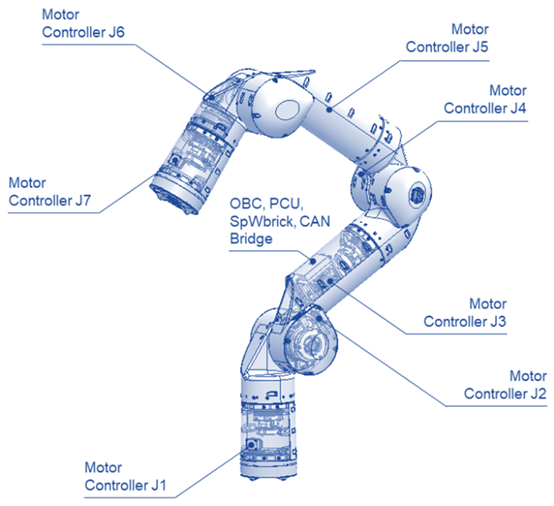
- Drivere
poziționate în articulații – arhitectură
distribuită ce permite control local rapid, reduce cablarea și
crește modularitatea.
Această
arhitectură avansată va permite o scalabilitate superioară
și o întreținere facilă, esențială pentru mediile
industriale moderne.
Componente electronice
și senzoriale cheie
Pentru
asigurarea unui comportament colaborativ și sigur, Cobotix-6H va integra
următoarele:
- Senzori de
forță/cuplu – montați în articulații sau
la efectorul final, vor permite controlul forței în
interacțiunea cu obiectele/manipularea delicată.
- Senzori de
coliziune
– detectează contactul accidental cu obstacole sau operatori,
trimițând comenzi de oprire.
- Senzori de
curent/tensiune
– monitorizează consumul energetic și protejează sistemul
de suprasarcini.
Efector final și interfață de control
- Efector
final modular
– proiectat să permită atașarea de unelte industriale
standard (torță sudură MIG/TIG, pensetă manipulare,
aplicator vopsea, aspirator paletizare etc.).
- Interfață
de control mobilă – formată din:
- Tabletă
tactilă industrială cu interfață grafică
prietenoasă, conectată prin Wi-Fi.
- Controller
dedicat ce gestionează în timp real comenzile și
sincronizează datele din driverele articulațiilor.
- Buton de
oprire de urgență – asigură oprirea instantă
a brațului în caz de pericol sau avarie.
⚙Modularitate și
design intern
- Toate subansamblele
mecanice și suporturile interioare vor fi proiectate în România
și executate intern (frezare CNC, carcase printate 3D sau turnate).
- Cablarea
va fi internă și integrată în structura brațului,
pentru a evita expunerea componentelor sensibile.
Siguranță
și standarde
Cobotul
va respecta principiile de siguranță în colaborarea om–robot
conform standardelor ISO/TS 15066 și EN ISO 10218-1, prin:
- limitarea
vitezei și forței de contact;
- control
activ al cuplului și forței;
- monitorizare
constantă a poziției și accelerației în
articulații.
|
|
3. Scopul și Necesitatea
Proiectului
|
Scopul principal al proiectului Cobotix-6H
Proiectul
Cobotix-6H are ca scop dezvoltarea și validarea unui braț
robotic colaborativ (cobot) cu 6 grade de libertate, complet proiectat
și executat în România, capabil să îndeplinească o gamă
largă de sarcini industriale: sudură, vopsire, manipulare, lipire,
debavurare, asamblare, paletizare, ambalare, finisare, testare și
inspecție de calitate.
Cobotul
va fi realizat cu un accent deosebit pe mecanismul de acționare
intern (servomotoare, reductoare armonice, drivere, senzori), asigurând autonomie
tehnologică și capacitate de producție locală.
Necesitatea
proiectului – probleme identificate
1. Lipsa unei
soluții cobot autohtone performante
- În
prezent, nu există pe piața românească un
braț robotizat colaborativ realizat local, capabil să
concureze din punct de vedere tehnologic și economic cu sistemele
importate.
- IMM-urile
din România care doresc să implementeze automatizări
robotizate sunt nevoite să apeleze exclusiv la echipamente străine,
costisitoare și dificil de întreținut local.
2. Dependență
de importuri din China și costuri mari
- Piața
este dominată de echipamente importate din China sau Coreea, a
căror fiabilitate este variabilă, iar mentenanța este
dificilă.
- Timpii de
livrare, costurile de transport și lipsa unor centre locale de
service generează blocaje în procesele industriale.
- Componenta
de software/firmware este adesea restrictivă sau închisă, ceea
ce îngreunează adaptarea la specificul local.
3. Cerere în
creștere pentru automatizare în IMM-uri românești
- Automatizarea
proceselor repetitive și periculoase a devenit o necesitate
pentru supraviețuirea companiilor mici și mijlocii în
contextul creșterii costurilor cu forța de muncă.
- Producătorii
români din domenii precum mobilă, automotive, prelucrări,
ambalaje sau alimentație caută soluții accesibile
și ușor de adaptat.
- Lipsa unui
produs local limitează accesul IMM-urilor la inovație și
digitalizare.
Rolul strategic al
Cobotix-6H
Prin
acest proiect, se urmărește crearea unei soluții robotizate
de tip cobot, performantă, scalabilă și economic
sustenabilă, proiectată integral în România, care:
- să
fie personalizabilă pentru diferite aplicații industriale;
- să
permită integrarea rapidă în linii de producție locale;
- să
reducă dependența critică de tehnologiile importate;
- să
contribuie la dezvoltarea capacităților naționale de
cercetare și producție în robotică.
|
|
4. Analiza Pieței
|
Potențialul pieței de coboturi în România
Piața
de roboți colaborativi (coboți) în România se află într-o
etapă incipientă, dar cu o tendință accelerată de
creștere, determinată de:
- Creșterea
costurilor cu forța de muncă și deficitul de personal
calificat;
- Presiunea
asupra IMM-urilor de a digitaliza și automatiza procesele;
- Necesitatea
reducerii erorilor umane, a efortului fizic repetitiv și a
accidentelor de muncă;
- Atragerea
de investiții în producția locală prin soluții
flexibile de automatizare.
La
nivel european, vânzările de coboți au crescut anual cu peste 15–20%,
iar România urmează aceeași direcție, mai ales în sectorul
privat industrial. Adopția tehnologiilor de automatizare
colaborativă este încă limitată, ceea ce oferă o oportunitate
reală pentru lansarea unui produs local competitiv.
Domenii țintă
pentru aplicarea Cobotix-6H
Cobotix-6H
este proiectat să răspundă cerințelor din industrii care
necesită:
- Sudură
MIG/TIG
– pentru repetiție, precizie și reducerea expunerii
operatorului;
- Vopsire
industrială
– unde consistența și mișcările fluide sunt
esențiale;
- Asamblare
de componente
– în electronică, mecanică fină sau automotive;
- Paletizare
/ ambalare
– în logistică, FMCG, distribuție;
- Manipulare
și sortare piese – în linii de producție
automatizate;
- Testare
și inspecție vizuală de calitate – cu
senzori integrați;
- Debavurare
și finisare
– în metalurgie sau prelucrări CNC.
Toate
aceste aplicații necesită un braț robotizat flexibil, sigur
și ușor de integrat în spații mici, caracteristici oferite de
Cobotix-6H.
Profilul clientului
potențial
IMM-uri industriale
Companii mici și mijlocii din România care doresc să automatizeze o
parte din producție, dar nu au bugete pentru roboți industriali
clasici sau personal tehnic specializat. Au nevoie de soluții ușor
de programat, cu costuri de operare reduse și mentenanță
locală.
Integratori de soluții robotizate
Firme specializate în instalarea de linii de producție, care caută
soluții modulare și flexibile, personalizabile în funcție de
client.
Ateliere tehnice, prototipare,
prelucrări mici
Lucrări de sudură, vopsire sau asamblare în serii mici, unde este
nevoie de versatilitate și precizie fără un cost prohibitiv.
Companii din logistica, ambalare și
automotive
Care caută automatizare în paletizare, inspecție vizuală,
sortare sau manipulare repetitivă.
|
|
5.
Obiective Tehnologice
|
Proiectul
Cobotix-6H urmărește obținerea unui rezultat concret:
un prototip complet funcțional de cobot industrial cu 6 grade de
libertate, dezvoltat în România, cu accent pe execuția mecanică
internă și pe integrarea inteligentă a componentelor
electronice și senzoriale.
Obiectivele
tehnologice sunt aliniate cu cele strategice, vizând independența
tehnologică, scalabilitatea industrială și inovarea
în acționare și control.
1. Realizarea
sistemului mecanic de acționare pentru braț 6 DOF
- Proiectarea
unei cinematici articulate cu 6 axe, optimizată pentru a
acoperi aplicații industriale precum sudură, manipulare,
finisare, paletizare etc.
- Utilizarea
de servomotoare cu encoder încorporat și reductoare
armonice de precizie, pentru mișcări fluide,
fără joc și cu răspuns rapid.
- Integrarea
driverelor în interiorul fiecărei articulații, reducând
cablajul și crescând modularitatea sistemului.
- Asigurarea
unui grad de libertate complet în mișcare (rotații,
înclinări, extensii) și a unei lungimi totale de 1400 mm,
pentru acoperirea unei arii mari de lucru.
2. Integrarea
senzorilor de forță, coliziune, tensiune și curent
- Implementarea
de senzori de forță/cuplu, esențiali pentru
interacțiuni sigure om–robot și pentru reglajul automat al
efortului de manipulare.
- Adăugarea
de senzori de coliziune, pentru oprirea automată în caz de
contact accidental, conform standardelor ISO de siguranță
colaborativă.
- Monitorizarea
parametrilor electrici prin senzori de curent și tensiune,
pentru prevenirea suprasarcinilor, diagnosticare în timp real și
prelungirea duratei de viață a componentelor.
- Transmiterea
datelor în timp real către controllerul central, pentru control
adaptiv al mișcărilor și protecția întregului sistem.
3. Realizarea
integrală a subansamblelor mecanice în România
- Proiectarea
și execuția componentelor mecanice portante, bratelor
și articulațiilor prin prelucrări CNC locale,
sudură de precizie și finisare industrială.
- Utilizarea
de materiale și standarde de calitate europene, pentru a asigura
fiabilitatea și scalabilitatea produsului.
- Montajul
mecanic complet și testarea subansamblelor vor fi realizate intern,
pentru asigurarea controlului total asupra calității
și flexibilitate în îmbunătățiri rapide.
- Se vor
evita soluțiile comerciale „off-the-shelf” din import, promovând tehnologie
proprie și independență de lanțurile de
aprovizionare asiatice.
Livrarea
unui braț robotic colaborativ care combină precizie,
siguranță, modularitate și autonomie, complet proiectat
și realizat în România, gata de validare industrială și
pregătit pentru producție în serie sau personalizare pentru
aplicații specifice.
|
|
6. Inovația Propusă
|
Proiectul
Cobotix-6H introduce o serie de inovații tehnice și
constructive menite să diferențieze acest cobot de alte
soluții existente pe piață, cu accent pe miniaturizare
inteligentă, eficiență structurală, modularitate
industrială și execuție integrală în România.
1. Poziționarea
driverelor în articulații – reducere de spațiu și
latență
O
inovație esențială a proiectului constă în integrarea
driverelor de control direct în fiecare articulație a brațului
robotic.
- Acest
lucru reduce considerabil lungimea cablurilor, diminuând latența
de transmisie a comenzilor și îmbunătățind
sincronizarea între axe.
- Se
elimină nevoia unui panou central complex, ceea ce reduce
volumul ocupat, simplifică designul și
îmbunătățește răcirea pasivă.
- Poziționarea
locală a driverelor permite diagnosticare și
mentenanță pe module individuale, fără a afecta
întreg sistemul.
2. Realizarea in-house a reductoarelor armonice (Harmonic
Drives)
Cobotix-6H
va integra redresoare armonice proiectate și fabricate local,
ceea ce reprezintă o inovație importantă în peisajul roboticii
românești.
- Reductoarele
armonice sunt esențiale pentru transmiterea unui cuplu mare cu
un raport de reducere ridicat și un joc mecanic aproape inexistent.
- Execuția
acestora in-house va permite:
- Reducerea
costurilor față de componentele importate;
- Adaptarea
geometriei pentru cerințe specifice ale proiectului;
- Transfer
tehnologic către alți dezvoltatori sau industrii din
România.
- Acest pas
contribuie direct la autonomia tehnologică națională,
reducând dependența de furnizori asiatici.
3. Modularitate și mentenanță facilă
Cobotul
va fi conceput cu o arhitectură complet modulară:
- Fiecare
segment (braț, cot, încheietură) va putea fi înlocuit sau
întreținut separat, reducând costurile de service.
- Modulele
articulate independente permit configurarea rapidă pentru
aplicații diverse, dar și extinderea la versiuni cu 4 sau 7
DOF.
- Documentația
deschisă și standardizarea interfețelor
mecanice/electrice vor sprijini reparabilitatea și reutilizarea
în mediul industrial.
4. Design scalabil
pentru utilizări multiple în industrie
Designul
Cobotix-6H este gândit astfel încât:
- să
fie adaptabil pentru o gamă variată de aplicații
industriale, fără modificări majore de
arhitectură (sudură, ambalare, testare etc.);
- să
poată fi personalizat ușor (efectori finali
interschimbabili, opțiuni de montaj pe perete, tavan sau mobil);
- să
permită extinderea ulterioară în serii comerciale, cu costuri
reduse de producție și integrare.
Valoarea
adăugată a inovației Cobotix-6H:
Prin
abordarea sa tehnologică și arhitecturală, Cobotix-6H devine
mai mult decât un simplu braț robotic – el devine o platformă
industrială deschisă, scalabilă, fiabilă și
sustenabilă, complet proiectată și executată în România.
|
|
7.
Planul de Implementare
|
Implementarea
proiectului Cobotix-6H este structurată pe o perioadă de 24
luni, împărțită în patru faze succesive și
interdependente. Fiecare fază conține obiective clare, rezultate
intermediare și activități tehnice esențiale pentru
realizarea integrală a prototipului colaborativ cu 6 grade de libertate.
Faza 1 – Proiectare
și simulare (Lunile 1–6)
Obiectiv: Definirea
completă a arhitecturii mecanice și funcționale a cobotului.
Activități
cheie:
- Proiectare
3D CAD a brațului cu 6 DOF (inclusiv efector final, carcasă,
baze de fixare);
- Modelare
cinematică și determinarea spațiului de lucru;
- Alegerea
și dimensionarea servomotoarelor și reductoarelor armonice;
- Realizarea
analizelor FEM (Finite Element Method) pentru verificarea
rezistenței și stabilității structurale;
- Specificarea
detaliată a componentelor electronice și senzoriale (tip,
poziționare, interfață).
Rezultat
intermediar: Documentație tehnică completă, plan de
execuție și prototip digital.
Faza 2 – Execuție
mecanică (Lunile 7–12)
Obiectiv: Producerea
fizică a componentelor și subansamblelor mecanice.
Activități
cheie:
- Prelucrarea
CNC a componentelor din aluminiu, oțel și materiale compozite;
- Realizarea
internă a carcaselor, modulelor și elementelor structurale;
- Asamblarea
brațului mecanic (fără parte electrică) și
verificarea cinematismului;
- Fabricarea
locală a reductoarelor armonice, pe baza designului intern;
- Controlul
calității asupra subansamblelor realizate.
Rezultat
intermediar: Braț mecanic complet asamblat, fără
electronice.
Faza 3 – Integrare
electro-mecanică (Lunile 13–18)
Obiectiv: Integrarea
completă a elementelor de acționare, control și senzori.
Activități
cheie:
- Montarea
servomotoarelor și driverelor direct în articulații;
- Configurarea
și montarea senzorilor (forță, coliziune,
curent/tensiune);
- Integrarea
cablajului intern, testarea conexiunilor și optimizarea
răcirii;
- Dezvoltarea
și încărcarea software-ului de control de bază;
- Integrarea
interfeței grafice pe tabletă și sistemul de
comunicație Modbus/Wi-Fi.
Rezultat
intermediar: Prototip complet montat, gata de testare
funcțională.
Faza 4 – Testare
și validare (Lunile 19–24)
Obiectiv: Verificarea
funcțională completă a cobotului și validarea
prototipului.
Activități
cheie:
- Testare
funcțională în sarcină (ridicare, poziționare,
paletizare etc.);
- Testare
colaborativă – evaluarea siguranței la coliziune și
reacția la comenzi;
- Validarea
preciziei și repetabilității (±0,1 mm) în scenarii
simulate;
- Îmbunătățiri
de finețe pe structură, software sau senzori în funcție
de rezultate;
- Întocmirea
raportului de validare și pregătirea pentru diseminare sau
industrializare.
Rezultat
final:
Prototip funcțional de cobot Cobotix-6H validat tehnic, testat,
documentat și pregătit pentru pre-serie.
|
|
8.
Echipa Proiectului
|
Implementarea
cu succes a proiectului Cobotix-6H se bazează pe o echipă
multidisciplinară, cu experiență relevantă în domeniul
ingineriei mecanice, mecatronicii, electronicii aplicate și
cercetării în robotică industrială. Fiecare membru are un rol
bine definit, contribuind la livrarea unui prototip colaborativ robust,
funcțional și adaptat cerințelor industriale actuale.
Coordonator proiect –
Expert în robotică industrială
- Răspunde
de planificarea, monitorizarea și controlul general al proiectului.
- Are
experiență anterioară în proiecte de cercetare
aplicată și dezvoltarea de sisteme robotizate.
- Coordonează
activitățile de management tehnic și
științific, relația cu partenerii și raportarea
către finanțator.
Inginer mecanic – specializat în cinematică și
structuri portante
- Responsabil
de proiectarea brațului cobot în mediu CAD (3D), incluzând toate
componentele articulate și suporturile portante.
- Realizează
analiza cinematică și simulările de efort (FEM),
asigurând robustețea și ergonomia sistemului.
- Colaborează
strâns cu inginerul mecatronic pentru integrarea elementelor active în
structura mecanică.
⚙Inginer
mecatronică – specializat în integrarea sistemelor de acționare
și senzori
- Coordonează
alegerea și integrarea servomotoarelor, driverelor, reductoarelor
armonice și a senzorilor de forță, coliziune, curent
și tensiune.
- Dezvoltă
și testează sistemul de comunicații (Modbus, Wi-Fi),
precum și algoritmii de control distribuit.
- Colaborează
cu programatorii și operatorii pentru validarea
funcțională a subsistemelor integrate.
Tehnicieni
specializați – execuție și testare
- Se
ocupă de prelucrarea, montajul și calibrarea componentelor
mecanice în atelierele proprii.
- Contribuie
la cablarea sistemului, testele funcționale și depanările
din faza de prototipare.
- Sprijină
activ echipa de ingineri în realizarea montajelor, adaptărilor
și măsurătorilor industriale.
Colaboratori externi
(opțional)
- În
funcție de nevoi, echipa poate coopta specialiști externi
pentru design PCB, dezvoltare software de control, testare în
aplicații reale sau validare independentă.
Structura
echipei este adaptabilă și scalabilă, asigurând
flexibilitate în alocarea resurselor și expertiză concentrată
pentru fiecare etapă tehnologică. Acest lucru oferă
proiectului un avantaj strategic în livrarea unui rezultat complex,
funcțional și replicabil.
|
|
9.
Estimare Costuri și Buget
|
Implementarea
proiectului Cobotix-6H necesită o structură financiară
echilibrată, adaptată obiectivelor tehnico-științifice
și etapele de dezvoltare asumate. Bugetul este orientat strategic spre activitățile
de proiectare, achiziție, execuție și integrare, asigurând
în același timp resurse pentru testare, validare și management de
proiect.
Distribuția
bugetară reflectă accentul pus pe realizarea integrală a
subansamblelor mecanice și sistemelor de acționare, precum
și pe dezvoltarea unui prototip funcțional cu aplicabilitate
industrială reală.
Structura bugetului estimat
|
Categorie
|
Buget
estimat (€)
|
Descriere
|
|
Proiectare mecanică
și cinematică
|
35.000
|
Activități CAD 3D,
simulări FEM, optimizări de structură
|
|
Achiziție componente
mecanice
|
50.000
|
Profile, rulmenți, carcase, elemente de fixare
|
|
Servomotoare, reductoare,
senzori
|
45.000
|
Componente de
acționare, senzori de cuplu, coliziune, curent
|
|
Execuție subansamble
interne
|
35.000
|
Prelucrări CNC, montaj module, carcase, mecanisme
articulate
|
|
Testare și calibrare
sistem
|
25.000
|
Validare
funcțională, măsurători, îmbunătățiri
hardware
|
|
Integrare software și
control
|
30.000
|
Interfețe Wi-Fi, comunicație Modbus, logica de
control, UI tactil
|
|
Cheltuieli administrative
& PM
|
30.000
|
Management, raportări,
logistică, audit, comunicare proiect
|
|
TOTAL ESTIMAT
|
~250.000
|
Buget maxim conform cerințelor proiectului
Horizon-style
|
Observații:
- Bugetul
include atât cercetare aplicată, cât și execuție
tehnologică internă.
- Se
acordă o pondere semnificativă mecanicii și
electronicii, reflectând complexitatea sistemului de acționare
și specificul colaborativ.
- Nu sunt
incluse costuri comerciale sau de marketing – proiectul este destinat prototipării
și validării tehnologice.
Această
structură bugetară permite livrarea unui prototip scalabil și
adaptabil pentru aplicații industriale multiple, contribuind direct la
creșterea capacității tehnologice a sectorului manufacturier
românesc.
|
|
10.
Parteneriate și Colaborări
|
Succesul
proiectului Cobotix-6H este susținut nu doar de expertiza echipei
interne, ci și de stabilirea unor colaborări strategice cu
parteneri tehnologici, instituții de cercetare și furnizori
specializați, care contribuie cu resurse, infrastructură
și validare externă.
Prin
aceste parteneriate, proiectul beneficiază de acces la expertiză
avansată, echipamente complementare, know-how tehnologic și
validare obiectivă, esențiale pentru atingerea unui nivel de
maturitate tehnologică ridicat (TRL 6–7).
Parteneri tehnologici
din industrie
- Colaborarea
cu firme românești de prelucrări mecanice, prototipare
rapidă și fabricare carcase metalice este
esențială pentru realizarea subansamblelor interne ale
brațului.
- Exemple de
parteneri pot include: ateliere CNC, producători de structuri
industriale ușoare, firme specializate în aluminiu extrudat,
carcase industriale și elemente de fixare.
- Aceste
parteneriate permit execuția rapidă, controlul
calității și adaptarea designului la specificul
industrial local.
Universități
și centre de cercetare – pentru testare și validare
- Se vor
stabili colaborări punctuale cu facultăți de inginerie
mecanică, mecatronică, automatizări și robotică
pentru:
- Teste
funcționale și evaluări independente;
- Utilizarea
laboratoarelor de analiză cinematică, senzoristică sau
control embedded;
- Validarea
preciziei, forței, siguranței colaborative și a
ciclurilor de funcționare.
- Posibili
parteneri: Universitatea Politehnica București, Universitatea
Tehnică din Cluj-Napoca, INCDMC – Institutul Național
de Cercetare Dezvoltare pentru Mecatronică și Tehnica
Măsurării.
Furnizori europeni
pentru servomotoare și senzori
- Pentru
componentele critice (servomotoare, reductoare armonice, senzori de
forță, coliziune, curent/tensiune), proiectul va colabora cu furnizori
europeni consacrați în robotică.
- Acest
lucru va asigura:
- Fiabilitate
crescută și suport tehnic localizat în UE;
- Conformitate
cu standardele de calitate și compatibilitate industrială;
- Timp de
livrare scurt și transparență în documentație
tehnică.
- Exemple
posibile: Maxon (Elveția), Harmonic Drive AG (Germania), TQ
Robotics (Germania), Roboteq (Franța), Techman (UE integratori).
Sinergii și
beneficii reciproce
- Proiectul
Cobotix-6H devine astfel un nucleu de cooperare între mediul de
afaceri și cel academic, consolidând ecosistemul românesc de
robotică aplicată.
- Rezultatele
obținute pot fi ulterior transferate partenerilor industriali,
sub formă de licențe, servicii sau produse adaptate,
contribuind la valorificarea cercetării în economia reală.
|
|
11.
Strategia de Comercializare
|
După
finalizarea fazei de cercetare, testare și validare a prototipului,
proiectul Cobotix-6H va intra într-o etapă de transfer tehnologic
și exploatare comercială a rezultatelor. Strategia de valorificare
este construită pe trei direcții complementare, adaptate
pieței din România: vânzare directă, licențiere
industrială și replicare modulară.
1. Vânzare directă
către IMM-uri industriale
- Se va
realiza o ofertă standard de produs, bazată pe
configurația de bază a prototipului Cobotix-6H, adresată
în mod special IMM-urilor din domenii precum:
- prelucrări
mecanice;
- ambalare
și logistică;
- sudură
și finisare;
- linii de
producție alimentare sau electronice.
- Avantajele
competitive ale vânzării directe:
- Prețuri
accesibile, optimizate pentru bugete locale;
- Asistență
tehnică și mentenanță locală;
- Configurație
ușor de integrat în spații reduse sau neautomatizate
anterior.
2. Licențierea
tehnologiei către integratori industriali locali
- Pentru
scalarea producției și diversificarea aplicațiilor,
proiectul prevede licențierea tehnologiei Cobotix-6H către
integratori de soluții industriale din România.
- Aceștia
pot:
- adapta
arhitectura cobotului la nevoile clienților proprii;
- integra
brațul în sisteme mai mari (celule robotizate, stații
automate);
- furniza
asistență, instruire și extindere post-instalare.
- Modelul de
licențiere poate include:
- vânzare
cu drept de utilizare comercială (cu suport);
- transfer
de know-how tehnic;
- furnizarea
de kituri de montaj parțial preasamblate.
3. Replicare
modulară pentru linii de producție și personalizare
- Datorită
arhitecturii modulare, Cobotix-6H permite:
- configurarea
în funcție de aplicație: 4, 6 sau 7 DOF;
- schimbarea
rapidă a efectorului final;
- montare
pe podea, perete sau sisteme mobile.
- Această
flexibilitate tehnologică deschide calea pentru:
- replicare
rapidă în producție de serie mică;
- integrare
în linii industriale preexistente;
- ofertare
personalizată pentru aplicații punctuale.
Obiectiv pe termen
mediu (2–3 ani):
- Lansa o
linie pilot de producție cu parteneri locali pentru realizarea
de 10–20 unități/an;
- Asigura
suport post-vânzare
și actualizări software;
- Construi
un model scalabil de comercializare B2B cu potențial de
extindere către export în Europa de Est.
|
|
12.
Strategia de Proprietate Intelectuală
|
Întrucât
proiectul Cobotix-6H dezvoltă o soluție robotică
originală, realizată integral în România, protejarea rezultatelor
cercetării este o componentă esențială pentru asigurarea
valorificării comerciale și a sustenabilității
inovării. Strategia de protecție a proprietății
intelectuale este construită pe trei direcții: drepturi de
autor, brevetare strategică și confidențialitate
contractuală.
1. Drepturi de autor
asupra designului sistemului de acționare
- Vor fi
înregistrate drepturi de autor pentru:
- documentația
tehnică originală (modele CAD, scheme
funcționale);
- designul
mecanic complet al sistemului de acționare pe 6 axe;
- arhitectura
modulară a sistemului de control integrat în articulații;
- software-ul
de bază de control (interfața de operare, logica de
mișcare).
- Acest tip
de protecție este potrivit pentru rezultatele creative și
originale, cu aplicabilitate directă în produsul comercial și
manualele de utilizare.
2. Posibil brevet –
configurație articulații și poziționare drivere
- Se va
analiza oportunitatea înregistrării unui brevet de invenție
pentru:
- configurația
mecanică inovativă a articulațiilor;
- poziționarea
distribuită a driverelor în articulații, care
contribuie la reducerea latenței și cablajului;
- designul
integrat al sistemului modular ce permite reconfigurări rapide
fără demontare completă.
- Brevetul
ar oferi protecție legală națională și
europeană, conferind un avantaj competitiv major în cazul
extinderii comerciale.
3. Clauze de
confidențialitate (NDA) pentru furnizori și colaboratori
- În toate
relațiile contractuale stabilite cu:
- furnizori
de componente;
- firme de
prelucrare;
- colaboratori
academici sau industriali;
- dezvoltatori
software;
se vor include clauze
NDA (Non-Disclosure Agreement) care interzic:
- reproducerea,
redistribuirea sau divulgarea detaliilor tehnice;
- utilizarea
independentă a ideilor sau designului fără acord scris.
- Această
măsură asigură protecția know-how-ului generat
și menține controlul asupra rezultatelor până la momentul
lansării comerciale.
Obiectiv general proprietate
intelectuala:
Asigurarea
unei strategii mixte de protecție a proprietății intelectuale
care să permită:
- valorificarea
tehnologică prin licențiere sau comercializare;
- limitarea
copierii neautorizate a designului;
- flexibilitate
pentru extinderea în UE fără riscul pierderii
exclusivității tehnologice.
|
|
13.
Riscuri și Măsuri de Atenuare
|
Într-un
proiect complex de cercetare și dezvoltare tehnologică precum Cobotix-6H,
anticiparea și gestionarea riscurilor este esențială pentru
atingerea rezultatelor planificate. Strategia de management al riscurilor
este axată pe monitorizare proactivă, testare
continuă și flexibilitate operațională, cu
măsuri concrete pentru reducerea impactului potențial.
1. Riscuri tehnice – soluție: testare incrementală
Descriere: Pot apărea erori
în proiectarea sau funcționarea subansamblelor mecanice,
disfuncționalități în integrarea servomotoarelor și
driverelor sau performanțe sub așteptări la nivelul preciziei
sau vitezei.
Măsură
de atenuare:
- Implementarea
unui plan de testare incrementală și modulară
pentru fiecare componentă.
- Validarea
fiecărei articulații înainte de integrarea în sistemul
complet.
- Evaluarea
funcțională în medii controlate, cu simulări de sarcini
reale.
2. Riscuri de
aprovizionare – soluție: furnizori multipli din UE
Descriere: Întârzieri sau lipsa
disponibilității componentelor critice (servomotoare, senzori,
reductoare) pot afecta termenele proiectului.
Măsură
de atenuare:
- Selecția
și contractarea a cel puțin doi furnizori alternativi
din Uniunea Europeană pentru fiecare componentă majoră.
- Achiziția
anticipată pentru componentele cu termen lung de livrare.
- Stoc
tampon de piese esențiale, în special pentru testare și
prototipare.
3. Riscuri de cost –
soluție: rezervă bugetară internă de 10%
Descriere: Creșteri
neprevăzute de prețuri la materiale, servicii sau taxe pot
depăși estimările inițiale.
Măsură
de atenuare:
- Includerea
în buget a unei rezerve de risc de 10% din bugetul total (aprox.
25.000 €).
- Achiziții
etapizate, cu evaluări de piață înainte de fiecare
fază majoră.
- Flexibilitate
în selecția tehnologiilor (ex. alternative mai economice pentru
unele componente, dacă este cazul).
4. Riscuri de integrare
– soluție: validare timpurie a compatibilității componentelor
Descriere: Posibile
incompatibilități între servomotoare, drivere, senzori și
interfețele de comunicare pot afecta funcționalitatea generală.
Măsură
de atenuare:
- Realizarea
de prototipuri funcționale intermediare pentru testarea
comunicației și controlului la nivel de subsystem.
- Utilizarea
de protocoale standardizate (Modbus, CANopen, Wi-Fi industrial).
- Implicarea
echipei de integrare încă din etapa de proiectare mecanică.
Abordare generală
de management al riscului:
- Monitorizarea
permanentă a progresului prin milestone-uri tehnice;
- Feedback
rapid din testare pentru decizii informate;
- Documentare
completă a neconformităților și ajustare
imediată.
|
|
14.
Impact Economic și Industrial
|
Proiectul
Cobotix-6H aduce un impact semnificativ asupra industriei
românești prin dezvoltarea primului cobot industrial cu 6 grade de
libertate realizat integral în România, adresând în mod direct nevoile de
automatizare ale IMM-urilor și obiectivele strategice privind
independența tehnologică națională.
1. Primul cobot 6 DOF (Six Degrees of Freedom) industrial
românesc dezvoltat intern
- Cobotix-6H
marchează o premieră în peisajul tehnologic autohton,
fiind primul prototip colaborativ cu 6 grade de libertate proiectat,
executat și testat integral cu expertiză românească.
- Realizarea
sa va consolida competențele naționale în robotică,
mecatronică și control automat, contribuind la dezvoltarea
unui ecosistem industrial de producție de roboți în România.
2. Reducerea costurilor
de automatizare pentru IMM-uri
- Soluția
propusă oferă un echilibru optim între performanță,
flexibilitate și cost, fiind proiectată special pentru a
reduce bariera de intrare în automatizare a IMM-urilor.
- IMM-urile
vor beneficia de:
- costuri
de achiziție mai mici față de soluțiile importate;
- întreținere
locală și timp de răspuns redus;
- adaptabilitate
la aplicații diverse (sudură, ambalare, manipulare etc.).
- Se
estimează o scădere a costurilor de integrare robotică
cu până la 30–40% pentru clienții locali.
3. Contribuție la
independența tehnologică a industriei locale
- Prin
producerea locală a subansamblelor mecanice, integrarea senzorilor
și realizarea software-ului, Cobotix-6H reduce semnificativ dependența
de tehnologii și componente importate, în special din China.
- Proiectul
consolidează capacitatea României de a proiecta, fabrica și
menține roboți industriali colaborativi, susținând
eforturile europene de resilient reshoring și autonomie
strategică în sectoarele critice.
- Este un exemplu
de sinergie între cercetare aplicată, industrie și
digitalizare, cu potențial de replicare în alte ramuri ale
automatizării.
|
|
15.
Monitorizare și Evaluare
|
Pentru
a asigura atingerea obiectivelor proiectului în termenii și bugetul
stabilit, Cobotix-6H va implementa un sistem riguros de monitorizare
tehnică, financiară și administrativă, bazat pe
livrabile clar definite, evaluări periodice și un mecanism intern
de audit.
Această
abordare permite menținerea controlului de calitate, adaptarea
rapidă la eventuale deviații și asigură trasabilitatea
progresului proiectului.
1. Livrabile clare și verificabile
Proiectul
va fi structurat în livrabile intermediare și finale, care vor fi
documentate, validate și arhivate. Printre livrabilele principale se
numără:
- Modele CAD
și simulări FEM (Finite Element Method) pentru
structura cobotului;
- Documentație
de execuție și montaj pentru subansamble mecanice și
electronice;
- Fișe
de testare și calibrare pentru fiecare componentă
integrată;
- Prototip
funcțional validat, testat în scenarii reale de
utilizare;
- Interfață
de control operabilă și cod software sursă
aferent.
2. Rapoarte lunare și milestone-uri intermediare
Proiectul
va fi urmărit printr-un calendar structurat în etape-cheie
(milestone-uri), cu livrabile și criterii de performanță
specifice fiecărei faze:
- Rapoarte
tehnice lunare ce includ: progresul față de plan, probleme
întâmpinate, soluții aplicate;
- Revizuiri
bimestriale de etapă (ex: după faza de proiectare,
execuție mecanică, integrare etc.);
- Întâlniri
de echipă și sesiuni de validare tehnică pentru fiecare
subsistem înainte de integrarea finală.
3. Mecanism de audit
intern și verificare
Pentru
asigurarea calității și transparenței, va fi implementat
un mecanism intern de audit care va evalua:
- Execuția
tehnică:
conformitatea componentelor realizate cu specificațiile,
acuratețea montajului, funcționalitatea sistemului;
- Execuția
financiară:
încadrarea în buget, respectarea contractelor și transparența
achizițiilor;
- Respectarea
calendarului:
actualizarea planificării în funcție de realitatea din teren
și raportarea întârzierilor.
Auditul
va fi realizat fie de un responsabil desemnat din echipă, fie de un expert
extern (consultant tehnic sau financiar), în funcție de
cerințele finanțatorului.
Obiectivul acestui
sistem de monitorizare:
- Asigurarea
livrării unui prototip de înaltă calitate;
- Justificarea
clară și transparentă a tuturor etapelor de lucru;
- Crearea
unei baze solide pentru replicare, extindere și transfer
tehnologic în etapa post-proiect.
|